可點擊的動畫!
可點擊的動畫!
什麼是輪廓偵測?
輪廓偵測是2D影像處理的重要工具。邊緣與前景至背景間的切換會被辨識出來,並根據得到的資訊計算出輪廓。輪廓偵測的特殊之處在於它也能可靠地應對外來光引起的干擾,因為外來光通常會照射整個物體。即使前景和背景的相對差異會不斷改變,仍能一如往常地偵測出輪廓。透過將參考用的輪廓與當前物體對照來進行物體識別。
輪廓偵測方式包含:
- 通過調整光照情況,從背景中提取出要標示的對象
- 通過刪除不需要的區域來最佳化輪廓
- 演算法會偵測即時影像中可能的輪廓,並依據數值門檻(分數)來區分通過或淘汰的部分。
輪廓偵測適用於哪些地方:
該技術主要用於圖式和形狀偵測以及物體識別,通常應用於打孔、碾磨、車削、或裝配。輪廓偵測主要用於這些領域來確保品質。
什麼是斑點分析?
斑點分析是一種重要的影像處理方法,主要是在一組相似的鄰近像素上篩選和分析影像特徵。
斑點「BLOB」(二進位大型物件,為新創詞)在此上下文中代表二元邏輯資料物體,大略的被概括為一組具有相同邏輯狀態的像素。鄰近像素的篩選通常是通過對灰階值進行閥值切分來完成。然後,可以從分析中得出關於各種特徵的結論。舉個例子,一個眾所皆知的功能是像素計數器。
斑點分析的方式包含:
- 通過對灰階度設定閥值來從背景中提取重點區域
- 通過各種屬性特徵來最佳化搜尋條件
- 對搜尋到的特徵進行計算,例如像素數(像素計數器)、面積重心、方向、形狀(像是圓度、矩形性)、和直徑
斑點分析適用於哪些地方?
目前有許多不同的應用。例如,班點分析不但可用於監測完整性、偵測存在或螺紋檢測,還可以用於計數和分類物體。
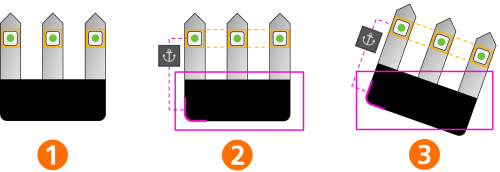
圖1)
在夾子的尖端,必須檢查三個焊球是否都存在(以綠色標示)
由於焊球的輪廓會改變,但焊球的面積保持不變,故使用了斑點分析。要執行存在監測的區域被設定成標為橙色的搜尋區。
圖2)
為了根據夾子的位置和方向追蹤這些搜尋區域,一個參考輪廓被定義出來,即所謂的錨點輪廓(以粉色標示)。然後,夾子左側圓角的輪廓便「錨定」在斑點分析的搜尋區。
圖3)
舉例來說,如果夾子此時旋轉了20度,則錨定輪廓也會處於旋轉過的狀態。斑點分析的橙色搜尋區域會接著自動追蹤到正確的位置和方向。