- Reconnaissance d'objets en 3D
- Plateforme de perception robotique O3R
O3R: système de capteur multi-caméras pour robotique mobile
Aperçu de la plateforme robotique
La plateforme de perception robotique O3R est un système multi-caméras et multi-capteurs dont les dimensions et les coûts associés n’ont rien à envier aux produits grand public. Simultanément, avec sa disponibilité durable, sa grande robustesse et ses performances fiables, elle présente tous les avantages d’un produit industriel mature.
Jusqu’à six têtes de perception peuvent être connectées via FPD-Link à l’unité centrale, la Video Processing Unit (VPU). Des capteurs supplémentaires tels que radar ou lidar peuvent être connectés via une interface Gigabit Ethernet ou CAN. Les têtes de perception peuvent être intégrées et disposées de manière flexible. Il est ainsi possible de détecter la totalité de l’environnement et, par exemple, de prévenir les collisions avec des obstacles se trouvant sur le trajet au-dessus du champ de vision du scanner de sécurité.
La puissante unité centrale Edge Compute Unit offre suffisamment d’espace de mémoire et de ressources de calcul pour exécuter vos propres algorithmes ou des fonctions prédéfinies, telles que l’évitement de collision ou la détection de palettes.
Sujets
Le niveau d’automatisation le plus élevé dans le secteur automobile
Le secteur automobile aspire au Niveau5. Avec cette automatisation complète, aucune interaction du conducteur n’est plus nécessaire. Un tel véhicule autonome serait utilisable sans risques par un consommateur final sans expertise.
Les constructeurs sont conscients que le Niveau5 ne peut être atteint qu’avec un ensemble de dispositifs de perception permettant au véhicule de détecter entièrement son environnement.
- Fusion de nombreux signaux de caméras et de capteurs pour sécuriser de manière fiable l’environnement du véhicule. Chaque principe de capteur est conçu de manière à équilibrer la «faiblesse» d’un autre principe, afin de constituer globalement une solution robuste pour la meilleure perception possible de l’environnement.
Des technologies éprouvées, adaptées à un nouveau domaine
L’autonomie est utilisée dans la robotique mobile depuis plus de 70ans. Le mode opératoire n’est donc pas nouveau, mais doit toujours relever les mêmes défis:
- Contrairement au secteur automobile, les coûts sont un obstacle à une adoption pour les robots mobiles.
- Les points d’entrée pour les robots mobiles requièrent d’importants investissements de la part de l’utilisateur, ce qui repousse le moment à partir duquel est réalisé un retour sur investissement élevé.
- Les fabricants sont obligés de faire des compromis lors du choix du matériel et de se concentrer en premier lieu sur la sécurité pour réduire les coûts de production. Au final, cela restreint la flexibilité générale du robot, ce qui à son tour réduit sa performance.
Et si vous ne deviez pas faire de compromis?
Automatisez la robotique mobile – avec la nouvelle plateforme O3R
L’approche du secteur automobile, d’atteindre le niveau d’automatisation5, est aussi correcte qu’importante. En effet, une meilleure perception de l’environnement mène à une plus grande flexibilité et à un fonctionnement général plus efficace et plus sûr du véhicule autonome.
Les mêmes possibilités et avantages devraient exister également pour le secteur des robots mobiles.
Pour atteindre un niveau d’automatisation élevé également dans la robotique mobile, il faut relever les défis des applications exigeantes avec plusieurs caméras, incluant la synchronisation et la fusion de capteurs. La seule possibilité de réduire les coûts d’exploitation totaux pour les plateformes de perception est de simplifier l’exécution et l’intégration de systèmes de caméras complexes.
La plateforme de perception robotique O3R a été développée pour accomplir cette tâche.
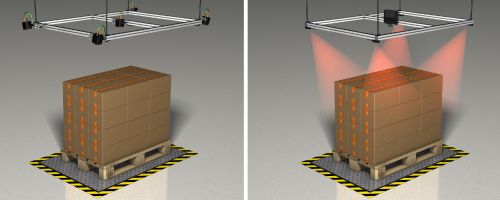
La plateforme O3R est la solution complète pour le traitement centralisé et synchronisé des informations d’image et de capteur dans des robots mobiles et autonomes comme les AGV/AMR. L’intégration simplifiée et la coordination fiable des caméras et capteurs permettent la mise en œuvre robuste de fonctions pertinentes telles que l’évitement de collision, la navigation et le positionnement. En outre, il est possible de procéder à l’analyse et au dimensionnement d’objets stationnaires, de manière plus efficace grâce à l’utilisation de plusieurs caméras. Les exemples incluent la mesure de palettes, de troncs, de paquets ou de valises.
Tête de perception (caméra) avec imageur développé en interne

Dans le cadre de sa solution de plateforme, ifm propose des têtes de perception adaptées et performantes : Les caméras 2D/3D disposent d'un angle d'ouverture de 60 degrés ou 105 degrés au choix et sont équipées de la dernière caméra ToF de pmdtechnologies ag. Cette entreprise du groupe ifm développe des capteurs qui sont utilisés dans les produits de vision du spécialiste de l’automatisation et elle les adapte précisément aux différentes exigences. Grâce à la lumière infrarouge modulée, la caméra 2D/3D détecte les objets en toute fiabilité même en cas de luminosité ambiante accrue.
Puissante et ouverte: l’unité centrale pour le traitement sensoriel

Le cœur du système est un processeur performant, la Video Processing Unit (VPU). La VPU se base sur Yocto Linux et NVIDIA Jetson TX2 et soutient des environnements de développement ouverts tels que ROS et Docker. La VPU dispose de connexions pour un maximum de six têtes de caméra; via une interface Gigabit Ethernet des capteurs supplémentaires peuvent être raccordés, comme des détecteurs ultrasons pour la détection de surfaces vitrées telles que portes et cloisons. Tous les «sens» pertinents dont a besoin un AGV pour une navigation autonome sûre sont ainsi enregistrés et traités à un endroit central.
L’architecture du logiciel O3R facilite le pré-développement ainsi que le développement de série grâce à un large choix d’outils logiciels et aux nombreuses interfaces supportées. Grâce à l’utilisation d’une architecture Docker, les environnements ouverts de développement tels que Python, ROS, CUDA et C++ sont supportés.
| Linux est le système d’exploitation le plus fréquemment utilisé dans la robotique. Les appareils auxiliaires doivent parler le même langage. | |
| Les conteneurs Docker offrent au développeur une totale flexibilité de langages et environnements de programmation. La durée du développement est réduite grâce à l’utilisation d’un environnement logiciel familier. | |
 |
ROS est un middleware souvent utilisé dans le développement. ROS2 offre toutes les possibilités dans le développement et assure une stabilité maximale dans l’utilisation réelle. |
| Des outils puissants tels que CUDA et Jetpack sont entièrement déployables sur la VPU basée sur NVIDIA. |