- Profiler
- Comparison of technologies
The technology of the PMD Profiler
PMD chip and triangulation: an unbeatable duo
The PMD Profiler line scanner works by means of triangulation: The projection unit emits a laser line on the surface to be measured. The reflection is detected by the receiving element that is mounted with an offset. Due to this angular offset, the distance of each individual light spot of the laser line can be determined exactly and a continuous height profile can be derived from it, resulting in an extremely precise 2D height profile of the detected object.
A PMD chip is used as the receiving element in the PMD Profiler. This has the advantage of high extraneous light immunity during the measurement process even when using a class 1 laser. Even in direct sunlight or changing light conditions, the PMD Profiler works reliably without restrictions.
PMD Profiler: The alternative to external ambient light sensitive camera systems and difficult to align 1D sensors
The PMD Profiler simplifies error checking – and enables automated quality inspection where reliable, efficient alternatives did not previously exist: Wherever camera systems are susceptible to extraneous light and thus dependent on expensive shielding and external lighting, the PMD Profiler operates independently of extraneous light. In addition, in contrast to 1D systems, it works distance-independent so that objects can be reliably detected even at variable distances. Moreover, the PMD Profiler provides additional information such as the scrap rate or a matching value between reference and target object that can easily be stored on an external device. In addition, the ifm Vision Assistant can be used to visualise object profiles and read out measured values, which can indicate a displaced object, for example. This simplifies fault analysis and prevents quality loss.
| PMD Profiler | PMD laser sensor | Camera system | ||
|---|---|---|---|---|
| Height sorting |  |
|||
| Difficult ambient light |  |
|||
| Easy set-up |  |
|||
| Colour sorting |  |
|||
| Shiny objects |  |
|||
| Variable target alignment |  |
|||
| Guided object | 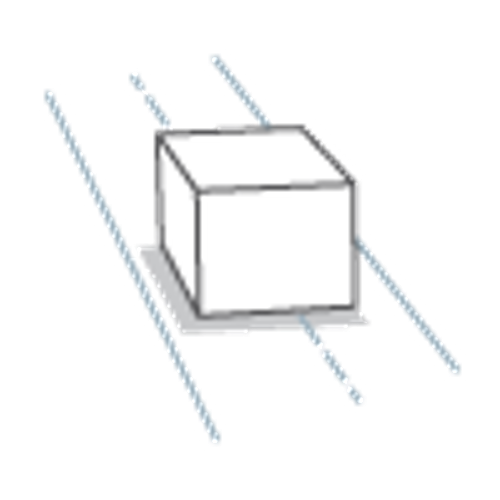 |
|||
| Non guided object | 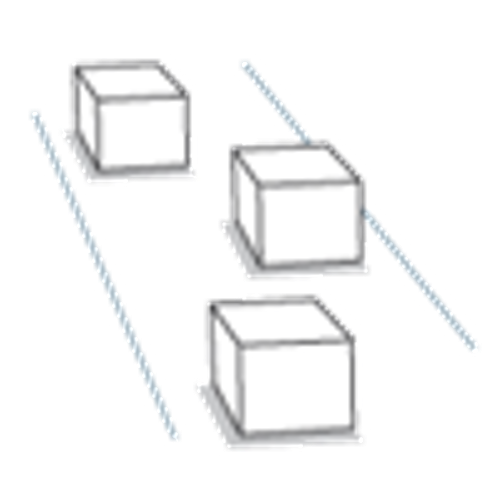 |
|||
| Dynamic application | 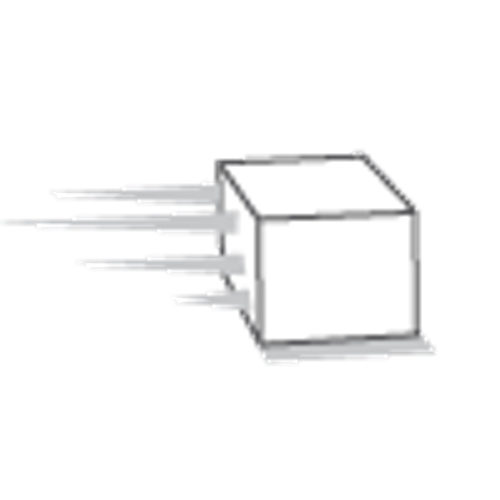 |
|||
| Profile detection | 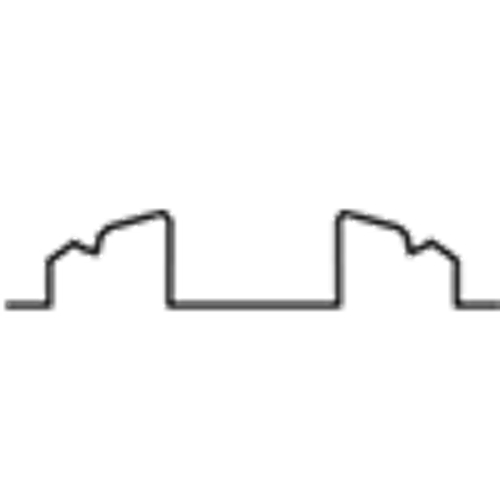 |
|||
| Precision |  |