- 3D prepoznavanje predmetov
- Platforma za robotiko O3R
Platforma za zaznavanje O3R
Platforma za zaznavanje v enem pogledu
Platforma za zaznavanje O3R je prehod z več senzorji in kamerami skladno z velikostjo in ceno potrošniških izdelkov – z dolgoročno razpoložljivostjo in robustnostjo industrijskega izdelka. Na centralno procesno enoto je mogoče priključiti do šest glav kamere prek FPD linka, dodatne senzorje, kot sta radar ali lidar, pa je mogoče priključiti prek vmesnika Gigabit Ethernet. Zaradi prilagodljivega položaja namestitve in razporeditve je mogoče skenirati spremenljivo različna območja in preprečiti npr. trke z ovirami, ki pridejo na pot premikanja nad vidnim poljem varnostnega skenerja.
Zmogljiva centralna robna računska enota nudi dovolj prostora za izvajanje vaših algoritmov ali uporabo pripravljenih funkcij, kot sta preprečevanje trkov ali zaznavanje palet.
Teme
Največja stopnja avtomatizacije v avtomobilski industriji
Panoga avtonomnih vozil (AV) želi doseči 5. stopnjo avtonomije, polno avtomatizacijo, pri kateri niso potrebne interakcije voznikov, ki bi omogočale, da bi splošni potrošnik kupil AV.
- Proizvajalci potrjujejo, da je 5. stopnjo mogoče pridobiti samo z zaznavanjem, ki omogoča, da vozilo bolje dojema svojo okolico.
- Večmodalni pristop za zaznavanje okolice vozila.
- Vsaka modalnost je zasnovana, da premaga »šibki člen« druge modalnosti in ustvari robustno platformo za najboljše zavedanje okolice.
Izzivi pri mobilni robotiki
Avtonomija ni nova pri mobilni robotiki (prvič uvedena v 1950-ih letih).
- Za razliko od panoge AV so stroškovne točke prepreka za prevzemanje premičnih robotov.
- Vstopne točke za mobilne robote zahtevajo veliko investicijo uporabnika in s tem podaljšajo čas za doseganje močne ROI.
- Proizvajalci so prisiljeni v kompromis pri izbiri strojne opreme in se primarno osredotočajo na varnost, da zmanjšajo stroške BoM.
- Nenazadnje to omejuje splošno prilagodljivost robota in postopno zmanjšuje njegovo zmogljivost.
Kaj pa, če vam ne bi bilo treba sklepati kompromisov?
Poglejmo stran iz »knjige« o AV
Panoga AV se ne moti pri svojem pristopu za doseganje avtonomije 5. stopnje.Večje zavedanje okolice privede do večje prilagodljivosti in boljšo splošno delovanje AV.Enaka zmogljivost bi morala biti na voljo tudi za panogo premičnih robotov.
Da bi to postalo resničnost, je treba olajšati izzive večmodalnih vrstah uporabe z več kamerami, kar vključuje sinhronizacijo senzorjev in združevanje.Edini način za zmanjšanje skupnih stroškov lastništva za platforme za zaznavanje je, da poenostavimo zasnovo in integracijo večmodalnih sistemov.
Platforma za zaznavanje O3R je bila zasnovana, da izpolni to nalogo.
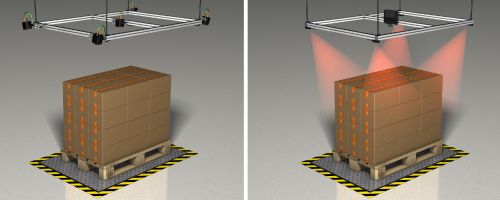
Platforma O3R je obsežna rešitev za centralizirano, sinhronizirano obdelavo slik in informacije o senzorjih v avtonomnih premičnih robotih, kot so AGV-ji. Poenostavljena integracija in zanesljiva interakcija kamer in senzorjev omogoča robustno implementacijo zadevnih funkcij, kot so preprečevanje trkov, navigacija in nastavljanje položaja. Poleg tega je mogoče vključiti analizo in dimenzioniranje stacionarnih objektov ter se obravnava učinkoviteje s pomočjo več kamer. Primeri vključujejo merjenje palet, debel, paketov ali kovčkov.
Glava kamere s slikovno napravo, ki smo jo razvili interno

Družba ifm nudi primerne, visoko zmogljive glave kamer kot del rešitev platforme: 2D/3D kamere imajo kot zaslonke 60° ali 105° in so opremljene z najnovejšo slikovno napravo time-of-flight družbe pmdtechnologies ag. To podjetje skupine podjetij ifm razvija vse senzorje za vizualne izdelke strokovnjaka za avtomatizacijo in jih natančno prilagodi na zadevne zahteve. Prek modulirane infrardeče svetlobe zazna 2D/3D kamera predmete z največjo zanesljivostjo tudi pri večji izpostavljenosti svetlobe iz okolice.
Zmogljiva in odprta: centralna enota za senzorsko obdelavo

Jedro sistema je zmogljiva računska enota, imenovana Video procesna enota (Video Processing Unit – VPU). Ta temelji na Yocto Linux in NVIDIA Jetson TX2 ter podpira odprto razvojno okolje, kot sta ROS in Docker. Na računsko enoto je mogoče priključiti do šest glav kamer. Dodatne senzorje, kot so ultrazvočni senzorji, za zaznavanje steklenih površin, kot so vrata ali predelne stene, je mogoče priključite prek vmesnika Gigabit Ethernet. Tako so prek osrednje točke na voljo vsi zadevni »čuti«, ki jih potrebuje AGV za varno avtonomno navigacijo.
Arhitektura programske opreme O3R olajša predhodni razvoj in razvoj serij prek bogate izbire programskih orodij in podpore od številnih vmesnikov. Z uporabo arhitekture Docker so podprta odprta razvojna okolja, kot so Python, ROS, CUDA in C ++.
| Linux je najpogosteje uporabljen OS v robotiki.Pomožne naprave morajo govoriti isti jezik. | |
| Zabojniki omogočajo razvijalcu polno prilagodljivost pri programskem jeziku in okolju. Čas razvoja se skrajša pri uporabi znanega programskega okolja. | |
 |
ROS je običajna vmesna programska oprema, uporabljena pri razvijanju.ROS2 nudi potencial za premik od razvoja do uvedbe. |
| Zmogljiva orodja, kot sta CUDA in Jetpack, je mogoče v celoti uvesti v VPU na podlagi NVIDIA. |