- 3D-tárgyfelismerő
- PDS raklapfelismerő rendszer
- A PDS integrációja
A PDS integrációja
Minden megoldás sikeres megvalósításának kulcsa a mindenkori előfeltételek pontos megértésében rejlik. Ez a PDS-re is érvényes. Ez a szakasz elmagyarázza, mely feltételeknek kell teljesülniük a PDS sikeres alkalmazásához. Ez a következőket foglalja magába:
- Beépítési helyzet:
Hol és hogyan kell felszerelni a kamerát a járművön. - Csatlakozások kiosztása:
Hogyan kell csatlakoztatni a PDS-megoldást (hálózati csatlakozás/kommunikáció). - Szoftveres interfész:
Hogyan van összekapcsolva a PDS-megoldás a jármű vezérlésével. - Érzékelhető raklaptípusok:
Mely raklaptípusok érzékelhetők a szabványos PDS-megoldással.
Az előírások betartásával garantálható a sikeres PDS-alkalmazás.
A PDS-megoldás

Beépítési helyzet
Dőlés

Szerelési magasság

Csatlakozások kiosztása
A PDS az O3D-kamerába van integrálva. Ez a kamera 24 V DC feszültségellátással rendelkezik, és az Etherneten keresztül kommunikál. A következő ábra mutatja a két interfsz csatlakozási rajzát:
Dugaszoló csatlakozó: 1 x M12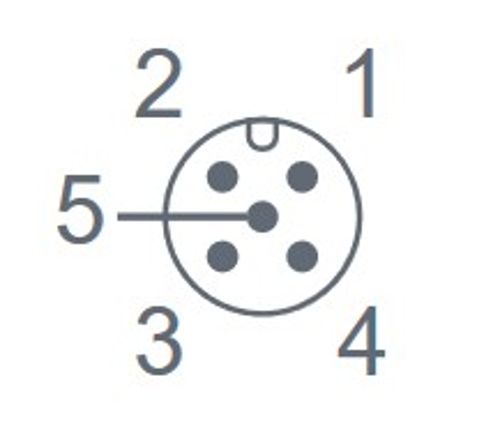 Villamos csatlakozás: Folyamatcsatlakozás |
Dugaszoló csatlakozó: 1 x M12 Villamos csatlakozás: Ethernet |
|---|---|
| 1. U+ | 1. TD+ |
| 2. Trigger bemenet | 2. RD+ |
| 3. GND | 3. TD- |
| 4. Kapcsoló kimenet 1 Ready | 4. RD- |
| 5. Kapcsoló kimenet 1 Sorba kapcsolás |
Megjegyzés: A kamera a képfelvétel során 2,4 A csúcsáramot igényel.
Érzékelhető raklaptípusok
A PDS-et két bemeneti nyílással rendelkező raklapok érzékelésére tervezték. A raklapoknál "fenékdeszkás" (blokk) és "Stringer" raklapokat különböztetünk meg.
A PDS a következő kétzsebes raklaptípusok /-geometriák érzékelésére használható:
 Fa, blokk |
 Fa, Stringer |
 Furnér, Stringer |
 Kétoldalas raklap |
 Megfordítható raklap |
 Kétutas raklap |
 GMA négyutas raklap |
 Rácsos raklap, Stringer |
 CHEP-raklap |
 PECO-raklap |
 műanyag |
 Fészkelhető, műanyag |
 IGPS-raklap |