- Sensores de visão
- Sensor de visão tipo O2D
- Tecnologia
Tecnologia do sensor de visão O2D
O2D em detalhes
Detecção de contornos
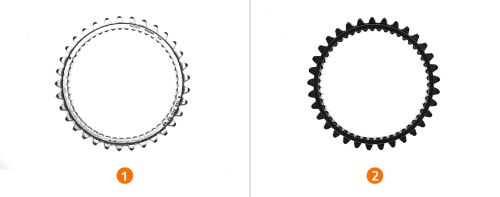
A detecção de contornos é uma ferramenta importante para o processamento de imagens 2D. As bordas, assim como as transições do primeiro plano para o segundo plano são detectadas e um contorno é calculado a partir das informações. A característica especial da detecção de contornos é que também funciona de forma confiável sob influência de luz externa, pois a luz externa geralmente atinge o objeto inteiro. A diferença relativa entre o primeiro plano e o plano de fundo muda, mas o contorno continua sendo detectado de maneira confiável. A inspeção do objeto é então realizada combinando um contorno de referência com o objeto atual.
A detecção de contornos ocorre através de:
- Extração do objeto a ser destacado do plano de fundo através do ajuste da situação de iluminação
- Otimização do contorno através da eliminação de áreas desnecessárias
- O algoritmo detecta possíveis contornos na imagem ao vivo que são distinguidos como peças boas ou ruins com base em um valor limite (pontuação)
Em quais aplicações se utiliza detecção de contornos?
O procedimento é utilizado principalmente no reconhecimento de padrões e formas, assim como no reconhecimento de objetos, como tipicamente aplicado em punção, fresagem, torneamento ou montagem. A detecção de contornos é usada para garantia de qualidade nestes setores.
Análise BLOB
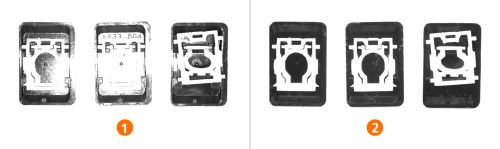
A análise blob é um importante método de processamento de imagens que consiste em selecionar e analisar características de imagens de pixels vizinhos similares.
BLOB (Binary Large Object em inglês) que neste contexto significa Binary-Logic Data Object, que se traduz livremente como um conjunto de pixels com o mesmo estado lógico. A seleção dos pixels contíguos é feita geralmente através do limite do valor cinzento. A partir da análise, podem ser tiradas conclusões sobre várias características. Uma função bem conhecida é, por exemplo, o contador de pixels.
A análise blob é realizada por:
- Extração da área de interesse do plano de fundo através da formação de valores limites sobre o valor cinzento
- Otimização dos critérios de busca por meio de vários atributos
- Cálculo das características procuradas, tais como a quantidade de pixels (contador de pixels), centro da área, orientação, forma (por exemplo, redondeza, retangularidade) e diâmetro
Onde se utiliza a análise blob?
Existem várias aplicações diferentes. Por exemplo, a análise blob pode ser usada para a verificação de integridade, verificação de presença ou detecção de roscas, assim como para a contagem e classificação de objetos.
Seguimento da posição
O seguimento de posição é feito com a ajuda de um contorno de âncora que é encontrado uma vez na imagem. A partir deste contorno, as zonas de busca podem seguir outros modelos (por exemplo, a zona de busca de uma análise blob) na posição, assim como na posição de rotação.
Representação gráfica de um seguimento de posição com base no exemplo:
Detecção de bolas de solda em um clipe
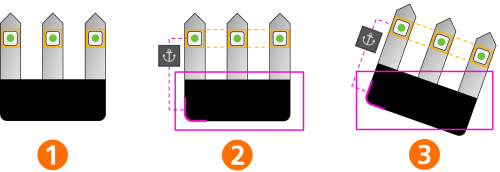
- Nas pontas de um clipe, deve ser verificado se as três bolas de solda estão presentes (mostradas em verde).
Como o contorno de uma bola de solda varia, mas a área de uma bola de solda permanece constante, se utiliza uma análise blob.As zonas de busca mostradas em laranja são definidas para a verificação de presença através da área a ser verificada. - A fim de seguir estas zonas de busca dependendo da posição e da rotação do clipe, é definido um contorno de referência; o chamado contorno de âncora (mostrado em rosa).O contorno do arredondamento esquerdo do clipe é então "ancorado" às zonas de busca da análise blob.
- Se o clipe agora for girado em 20 graus, por exemplo, o contorno da âncora também se encontrará no estado girado. As zonas de busca laranja da análise blob são então automaticamente seguidas até a posição e rotação corretas.
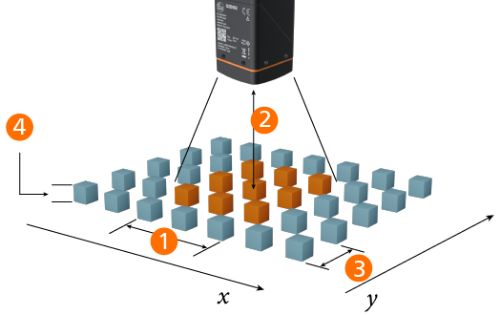
A família O2D5 da ifm utiliza um processador de imagens CMOS com 1,2 MP (1280 x 960 pixels).
- Cada pixel contém um fóton (photon) que coleta e amplifica a luz da lente da câmera.
- Microlentes em cada pixel maximizam o contato com o fóton.
- O fóton acumula uma carga elétrica proporcional à quantidade de luz que recebe.
- A carga elétrica é convertida em um sinal de tensão analógico.
- O sinal analógico é transmitido para um conversor A/D.
- O processador de imagens avalia cada sinal digital e produz uma imagem.
Os processadores de imagens CMOS são mais fáceis, rápidos e baratos de fabricar, o que os torna os mais utilizados no mercado.
Escolher a iluminação correta para maximizar o contraste de cada pixel é fundamental. A família O2D é fornecida com fontes de luz LED integradas de alta intensidade em RGB W (vermelho, verde, azul, branco) e infravermelho.
Tenha em conta que o sensor de imagem não é um sensor de cor!
Entretanto, a escolha de uma fonte de luz com uma cor diferente pode exercer um grave efeito sobre o contraste da imagem. A imagem abaixo mostra canetas de cor à luz do dia e as mesmas canetas de cor iluminadas pelos diferentes LEDs do sensor O2D5.
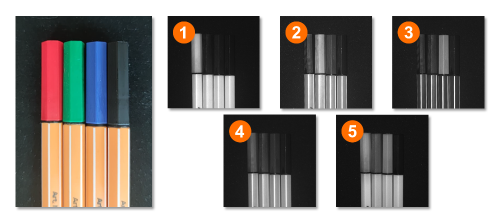
Comparação das fontes de luz
| Tipo de luz | Ter em conta: |
|---|---|
| Luz do dia (referência) |
|
| Luz vermelha |
|
| Luz verde |
|
| Luz azul |
|
| Luz branca |
|
| Luz infravermelha |
|
Efeito do filtro de polarização
Devido aos reflexos, pode ser difícil obter contornos nítidos ou áreas sobre objetos brilhantes. Os sensores O2D5 com fontes de luz RGB W possuem um filtro de polarização que pode ser ativado e desativado para minimizar o efeito dos reflexos.
- Sem filtro de polarização
- Com filtro de polarização